A self-powered kirigami cube sensor detects force direction and pressure through one signal channel, enabling compact and efficient tactile input for human-machine interfaces.
(Nanowerk Spotlight) Every time a finger swipes a screen, turns a joystick, or presses a button, a machine responds to force. But that force—though rich with intent—is often interpreted in a surprisingly limited way. Most tactile sensors can tell when something has been touched, and sometimes how hard. But few can tell where that force came from, what direction it moved in, or how that movement changed over time. For machines to interact more fluidly with people—whether in robotics, prosthetics, virtual reality, or remote controls—they need to sense touch not just as a signal, but as an action unfolding in space.
The technical challenge lies in how directional input is usually captured. To tell the difference between a push from the left and a press from the top, sensors need to gather information from multiple angles. That means arranging several sensor units side by side, each connected by its own wiring and circuitry. This makes the system more complex, less flexible, and harder to miniaturize. The more nuanced the interaction, the more tangled the hardware becomes.
Engineers have tried various solutions: arrays of pressure sensors, layered materials that respond to force in different ways, or flexible circuits that stretch and bend. But each approach runs into trade-offs—between size and precision, sensitivity and simplicity, or responsiveness and durability. And adding more sensors doesn’t just add cost. It increases the chance of failure, makes maintenance harder, and limits how easily these technologies can be embedded in things like gloves, wearable interfaces, or robotic surfaces.
What if a single sensor could do the work of many? What if it could not only detect pressure, but also determine the direction of that pressure, using just one electrical output? And what if it didn’t need external power, springs, or complex packaging to do it?
The result is a compact, self-powered sensor that responds to touch from multiple directions—and translates that touch into electrical signals using a single wire. The structure is inspired by kirigami, a method of cutting and folding materials that creates complex forms from simple sheets. And in this case, the folded shape is not just aesthetic—it’s what makes the sensor work.
The research team developed what they call a kirigami cube triboelectric vector sensor (KC-TVS). It’s built from paper, conductive fabric, and dielectric materials arranged on four folded faces of a cube. When the cube is compressed from different directions, it creates electrical signals with different waveforms, allowing the system to infer both the magnitude and direction of the applied force. And it does all this without needing an external power supply.
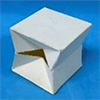
The fabrication process and shape of triboelectric vector sensor based on kirigami cube. a) The fabrication process of the self-powered sensor achieved through integrated structural design and material optimization. b) TENG arrangement of kirigami cube units in 2D state. c) Optical photos of the kirigami cube unit in different states, followed by optical photos of a KC-TVS in a stretched state and under compression. (Image: Reprinted with permission by Wiley-VCH Verlag) (click on image to enlarge)
At the heart of the sensor is a mechanical property known as a negative Poisson’s ratio. Most materials stretch in one direction and contract in the other—like a rubber band. But a structure with a negative Poisson’s ratio contracts inward when squeezed, allowing it to spring back into shape without external help. This built-in elasticity means the cube can deform and recover repeatedly without the need for springs or sponges. That makes the sensor faster, lighter, and easier to integrate into wearable or compact devices.
The cube contains four independent triboelectric layers, each made from a different dielectric material. A dielectric is a non-conductive material that becomes electrically charged when rubbed or pressed against a conductive surface. The materials used—FEP, PTFE, and PI—each produce slightly different signals when pressed. By pairing them with varying contact areas on different faces of the cube, the sensor produces a distinct electrical signature depending on the direction and strength of the touch.
When force is applied, contact and separation between the conductive and dielectric layers generate a voltage. These signals are then passed through a single electrical output channel. Instead of relying on physical separation of signals via multiple wires, the researchers used software to extract meaning from the shape of each waveform. The voltage amplitude, timing, and peak features differ depending on where and how the cube is pressed.
To interpret these differences, the team trained a convolutional neural network (CNN), a type of algorithm that detects patterns in data. But instead of using just signal height or timing, the model looks at the gradient of each waveform—the rate at which voltage changes. This gradient-based method filters out background noise and variations in pressure, allowing the system to focus on key features that distinguish one direction from another.
The sensor achieved a response time of 48 milliseconds, a minimum detectable pressure of 0.2 newtons, and a pressure sensitivity of up to 8.58 volts per newton at low forces. It remained stable after 150,000 cycles of repeated pressure, highlighting its durability. Machine learning analysis showed a classification accuracy of 99.38% when identifying directional input, using just one signal line.
The researchers tested the system in two practical applications. In the first, the sensor was integrated into a joystick-style interface. The cube was placed beneath a small plate that users could tilt forward, backward, left, or right. As the plate moved, the cube compressed, sending voltage signals to a neural network that interpreted the direction. Traditional joystick sensors would use eight wires; the KC-TVS reduced this to two. A visual interface showed real-time directional feedback, confirming that the system could decode motion from a single channel with high reliability.
In the second application, the cube was mounted on a fingertip to create a wearable touch interface. As the user pressed or swiped against surfaces—or squeezed another sensor-equipped finger—the cube generated voltage signals that corresponded to different gestures. These were processed in real time by a microcontroller and displayed on a screen. When the fingers moved apart, the system recognized the motion and responded with a visual output, such as enlarging a digital object. When the fingers came together, the system recognized the compressive gesture and adjusted the output accordingly.
To build the sensor, the team used laser-cut paper, layered with conductive and dielectric materials. The paper thickness, contact surface area, and choice of dielectric materials all influenced performance. Thicker paper improved contact stability up to a point, but beyond 0.5 mm the folding became unreliable. The dielectric material combinations were selected through simulation and experimental testing to maximize signal distinctiveness between directions. The device was also encapsulated to reduce sensitivity to humidity.
The underlying physics of the system were modeled using standard equations describing electric fields and charge distribution in contact-mode triboelectric generators. The key parameters influencing signal strength included the dielectric constant of the materials, the geometry of the cube, and the contact area between layers. By modeling these relationships, the researchers were able to tune the sensor design for optimal performance.
What distinguishes this work is not just its mechanical elegance or material efficiency, but its conceptual simplicity. The kirigami cube translates physical deformation into a complex but decodable signal, then uses software to interpret that signal with high precision. It avoids the need for bulky sensor arrays or energy-hungry components. And it reduces the wiring burden to a single channel, which simplifies manufacturing and expands where and how these sensors can be used.
The combination of structural elasticity, material variation, and machine learning opens up new possibilities for human–machine interfaces. The KC-TVS could be embedded in wearable gloves, smart surfaces, robotic skins, or control systems that require spatial awareness with minimal hardware. Because it is self-powered, it can operate without a battery, and because it is compact, it can fit into devices that traditional sensor arrays cannot.
Looking forward, the team points to the potential for combining the KC-TVS with multi-sensor fusion and computer vision systems, enabling richer interaction in fields such as robotics, teleoperation, virtual reality, and adaptive user interfaces. As machines are expected to respond to human intent with greater subtlety and speed, the ability to sense both how and from where a force is applied—using only one output—represents a meaningful step toward that goal.
For authors and communications departmentsclick to open
Lay summary
Prefilled posts
ORCID information
Jie Wang (Beijing Institute of Nanoenergy and Nanosystems)
, 0000-0003-4470-6171 corresponding author
Nanowerk Newsletter
Get our Nanotechnology Spotlight updates to your inbox!
Thank you!
You have successfully joined our subscriber list.
Become a Spotlight guest author! Join our large and growing group of guest contributors. Have you just published a scientific paper or have other exciting developments to share with the nanotechnology community? Here is how to publish on nanowerk.com.