A dual cross-linked magnetic polymer solves the fundamental trade-off limiting soft artificial muscles, achieving unprecedented combinations of stretchability, force output, and shape-programming ability.
(Nanowerk Spotlight) Soft artificial muscles can bend, stretch, and twist in ways that rigid motors cannot. They promise robots that navigate confined spaces, wearable devices that move with the body, and surgical tools gentle enough to handle living tissue. Yet these materials share a crippling flaw: they are weak. The same molecular flexibility that allows large deformations prevents them from generating substantial force.
Engineers quantify this limitation through work density, the mechanical energy an actuator delivers per unit volume, measured in kilojoules per cubic meter. Think of it as a measure of useful output: how much pushing, pulling, or lifting an actuator can accomplish relative to its size. Stretch a soft polymer far, and it produces little force. Stiffen it to boost force, and it barely moves. This trade-off has capped work densities at a few hundred kilojoules per cubic meter, keeping soft actuators confined to laboratory demonstrations rather than practical machines.
Every major technology has collided with this barrier. Dielectric elastomer actuators achieve strains around 250% but require high voltages and generate limited force. Carbon nanotube yarns weigh almost nothing yet lift little. Liquid crystal elastomers bend and twist with strains near 45% but deliver modest energy output. Phase-change materials switch stiffness by 200-fold but stretch only about 60%. Natural skeletal muscle, the benchmark, manages roughly 40% strain and less than 40 kJ m⁻³ work density. No synthetic system has dramatically exceeded both numbers simultaneously.
A research team at the Ulsan National Institute of Science and Technology in South Korea has now pushed past this ceiling. Their magnetic composite actuator, reported in Advanced Functional Materials (“Soft Magnetic Artificial Muscles with High Work Density and Actuation Strain via Dual Cross‐Linking Design”), delivers a work density of 1150 kJ m⁻³ and an actuation strain of 86.4%, among the highest values reported for any soft artificial muscle.
The material stretches to 1274% elongation before breaking and switches stiffness from 213 kPa to 292 MPa, a ratio of 1370. It locks programmed shapes with greater than 99% efficiency. A strip weighing just 1.25 g supports 5 kg in its rigid state, more than 4000 times its own weight.
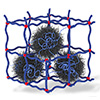
Dual cross-linking strategy and thermomechanical actuation mechanism of the magnetic artificial muscles. a) Schematic illustration of the dual cross-linked polymer network, integrating chemical and physical cross-links to achieve high mechanical robustness and deformability. b) Structural composition of the magnetic composite, consisting of a thermoresponsive polymer matrix embedded with uniformly dispersed ODTS-treated NdFeB microparticles. c) Thermally and magnetically driven actuation mechanism based on reversible crystallization/melting of long alkyl side chains and magnetic-field-induced deformation, enabling programmable stiffness modulation and shape programming. (Image: Reproduced from DOI:10.1002/adfm.202516218, CC BY) (click on image to enlarge)
The advance stems from a dual cross-linking architecture combining two types of molecular connections within a single polymer network. Permanent covalent bonds form through chemical reactions between stearyl methacrylate, a monomer with long hydrocarbon side chains, and ethylene glycol dimethacrylate, a connector molecule linking polymer chains at two points. This chemical scaffold provides structural backbone.
Simultaneously, the long alkyl side chains crystallize when cooled, creating temporary physical connections that stiffen the material and store elastic energy. Heating above 37.3 °C melts these crystalline domains, leaving a soft, deformable matrix. Cooling below 26.4 °C reforms them, rigidifying the structure and trapping energy for later release.
Embedded throughout this dual-network polymer are neodymium-iron-boron microparticles, tiny permanent magnets coated with a two-layer surface treatment. A silica shell roughly 20 nm thick encases each particle. Octadecyltrichlorosilane, a hydrophobic compound, adds a second layer approximately 5 nm thick. These coatings disperse the particles evenly and strengthen bonding with the surrounding polymer. Without treatment, magnetic particles clump and weaken the composite.
This architecture enables two actuation modes. In the soft state above the melting temperature, an applied magnetic field can stretch, bend, or twist the material. Removing the field allows elastic recovery. Cooling then locks whatever configuration the actuator holds while storing elastic energy in the crystallized side chains. Reheating triggers contraction as the stored energy releases, enabling the actuator to perform mechanical work.
Systematic experiments identified an optimal formulation: 11 g of surface-modified magnetic particles combined with 0.025 wt% cross-linker. At this composition, constrained thermal cycling tests yielded 86.4% actuation strain and 1150 kJ m⁻³ work density. Recovery ratio approached 100%, indicating full shape reversibility. After 300 thermo-mechanical cycles, the actuator retained more than 87% of initial performance while still supporting more than 4000 times its own weight in the rigid state. Specific power output reached approximately 404 W kg⁻¹, competitive with existing artificial muscle technologies.
Robotic demonstrations showed practical capabilities. Actuators gripped objects magnetically in the soft state, then contracted via localized laser heating to lift weights between 77 and 115 g with strain recoveries of 39% to 52%.
Benchmarking places this actuator in previously unoccupied performance space. Hydrogel actuators reach 40% to 65% strain but stay below 400 kJ m⁻³. Shape memory polymers and liquid crystal elastomers approach 800 kJ m⁻³ yet rarely exceed 45% strain.
Carbon nanotube yarns and thermoplastic polyurethane fabrics achieve 62% to 92% strain and 487 to 842 kJ m⁻³. None combines high strain with high energy output as effectively as this dual cross-linked composite.
The research demonstrates that engineering both chemical and physical cross-links within a single polymer system can overcome what many considered an intrinsic material limitation. Because the composite responds to remote magnetic and photothermal signals, it suits untethered applications where direct wiring is impractical.
The combination of programmable deformation, stiffness switching, and high energy delivery within one platform opens paths toward soft robots, wearable devices, and biomedical tools that may finally approach the versatility of biological muscle.
For authors and communications departmentsclick to open
Lay summary
Prefilled posts
ORCID information
Hoon Eui Jeong (Ulsan National Institute of Science and Technology (UNIST))
, 0000-0002-1413-3774 corresponding author
Nanowerk Newsletter
Get our Nanotechnology Spotlight updates to your inbox!
Thank you!
You have successfully joined our subscriber list.
Become a Spotlight guest author! Join our large and growing group of guest contributors. Have you just published a scientific paper or have other exciting developments to share with the nanotechnology community? Here is how to publish on nanowerk.com.