A new electronic skin sensor uses magnetic cilia to detect both pressure and magnetic fields for applications in health and touchless interfaces.
(Nanowerk Spotlight) Electronic skin, or e-skin, refers to synthetic materials that replicate the sensing capabilities of human skin. These systems are designed to perceive pressure, touch, temperature, and other forms of external stimulation, and convert them into electrical signals. As machines increasingly interact with people and environments—through wearable health monitors, prosthetics, robotic limbs, and touchless control systems—there is growing demand for interfaces that can sense and respond with a level of precision comparable to biological tissue. But building a synthetic surface that can operate across multiple sensing modes, with both high sensitivity and accuracy over a wide range, remains difficult.
Human skin is remarkably adaptable. It responds to the faint brush of air and the weight of objects alike. It also detects stimuli without direct contact, such as changes in airflow or electromagnetic fields through hairs and follicles. Engineers have tried to mimic these capabilities using a variety of sensor designs, but performance has typically come with trade-offs. Sensors that detect tiny pressures often fail under stronger forces. Those that cover a broad range tend to lose fine resolution. Achieving both high sensitivity and a wide detection range in more than one sensing mode—particularly for pressure and magnetic fields—has proven to be a persistent obstacle.
Previous research into dual-mode sensors has produced some promising prototypes. For example, triboelectric and capacitive sensors can detect mechanical contact and field interactions, but their performance is often limited to narrow bands of pressure or magnetic strength. Other efforts have integrated ferrofluids or flexible magnetic materials, but these designs typically favor either contact or noncontact sensing—not both. To function effectively in real-world applications such as medical diagnostics or human-machine communication, sensors must deliver consistent, high-quality data regardless of contact, force magnitude, or field strength.
One design strategy that has shown potential is inspired by biology. The combination of hair-like structures (cilia) and the surrounding follicle in skin plays a key role in mechanosensation, providing graded responses to a variety of stimuli. Replicating this layered architecture in synthetic form offers a way to distribute and control mechanical stress across a surface, and may provide a path toward stable dual-mode functionality.
In a study published in Advanced Functional Materials (“Magnetic Cilia and Hair-Follicle Architecture Enabled Dual-Mode Bionic E-Skin for High-Sensitivity and Wide-Linear-Range Tactile/Touchless Perception”), researchers at Hangzhou Dianzi University and Zhejiang University developed a flexible e-skin based on this concept. Their design combines magnetic cilia with a curved, follicle-like base to create a sensor capable of detecting both pressure and magnetic fields with high sensitivity over a wide linear range. The device, called a magnetic cilia and hair-follicle architecture (MCHFA) sensor, uses simple mechanical principles and readily available materials to achieve dual-mode performance.
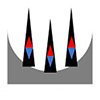
a) Schematic illustration of the bionics design of an MCHFA-based sensor. b) Scheme illustration, finite element analysis, and equivalent circuit analysis of the sensingmechanism of the MCHFA-based sensor in contact and non-contact mode. (Image: Reprinted with permission by Wiley-VCH Verlag) (click on image to enlarge)
The sensor operates on a piezoresistive principle. As external stimuli cause the cilia to bend, the contact area between them and the underlying electrodes changes, altering the electrical resistance. To enable this, the cilia are coated with multi-walled carbon nanotubes, which form conductive pathways that respond sensitively to changes in contact area. The inclusion of carbonyl iron powder in the cilia makes them responsive to magnetic fields, while the varying height of the cilia and the curved base structure allow for graduated mechanical deformation. This tiered structure ensures that different parts of the sensor activate progressively, maintaining responsiveness across low and high levels of pressure or magnetic influence.
In pressure mode, the sensor demonstrates a sensitivity of 2.72 kPa⁻¹ up to 26 kPa, and 0.60 kPa⁻¹ from 26 to 400 kPa, with both ranges showing near-perfect linearity (R² = 0.99). This means the sensor can detect faint mechanical touches as well as substantial force, with consistent proportional output. In magnetic mode, it responds linearly to field intensities from 30 to 171 millitesla, with a sensitivity of 2.8 T⁻¹ and R² of 0.94. It can detect magnetic field changes as small as 10 mT and maintain stable output over thousands of cycles.
These performance metrics are significant not just for their technical range but for their resolution. Under low pressure, the sensor can detect differences as small as 1 Pa. Even under 200 kPa, the resolution remains high—well beyond what is typical for piezoresistive sensors containing magnetic fillers. Tests confirmed that the sensor could distinguish subtle changes in weight, such as the difference between a pen and a ruler placed on a fixed load, or capture physiological signals like pulse waves and breathing cycles with clarity.
Durability testing showed consistent behavior over 10,000 loading cycles, and environmental tests confirmed stability at elevated humidity and temperature. The sensor also responded reliably under rapid cycling conditions and vibration, indicating suitability for dynamic environments such as wearable devices or motion interfaces.
Two application prototypes were demonstrated to illustrate the system’s practical potential. One is a wearable rehabilitation glove for finger joint training. Sensors attached to each finger detect bending angles and relay this data to a simple game interface. The game tracks whether the user bends each finger to a target angle within a defined time, providing visual feedback and scoring. This setup enables interactive, task-based training for patients recovering from hand injuries or neurological conditions, and the sensor’s sensitivity allows for fine-grained tracking of motion.
The second prototype is a noncontact coded lock. A 3×3 array of MCHFA sensors forms a keypad that can be activated by a magnet worn on the user’s finger. As the finger approaches each region, the cilia respond to the magnetic field without requiring touch. Voltage changes triggered by the bending cilia are digitized and processed to verify access codes. This type of interface avoids leaving physical fingerprints and reduces infection risks in clinical or public settings. Multiple access patterns can be programmed, and successful trials showed the system functioning reliably across several user-defined codes.
The research demonstrates a practical method for building robust, flexible, and multifunctional sensors without relying on complex electronics or exotic materials. The use of gradient mechanical structures and magnetic fillers in a layered configuration offers a way to merge tactile and field sensing in a single device. While further work may be needed to integrate these sensors into large-scale systems or wireless platforms, the results point to a scalable design strategy for e-skin technologies.
Rather than relying on separate modules for contact and noncontact detection, this approach enables dual-mode sensing through structural design alone. That reduces the need for multiple sensing components and simplifies integration into wearable systems, prosthetics, or intelligent robotics. The study highlights how biomimetic strategies can offer concrete solutions to persistent engineering trade-offs, enabling more adaptive and efficient human-machine interfaces.
Get our Nanotechnology Spotlight updates to your inbox!
Thank you!
You have successfully joined our subscriber list.
Become a Spotlight guest author! Join our large and growing group of guest contributors. Have you just published a scientific paper or have other exciting developments to share with the nanotechnology community? Here is how to publish on nanowerk.com.